Liquid transfer is one of the essential skills used in a chemistry lab. A pouring skill that intermittently rotates the container is implemented. This pouring strategy compensates the delayed feedback from the scale and outperformed PD controller. We present and analyze a set of accurate and efficient pouring skills inspired by human motions.
Framework for Robot-assisted Chemical Synthesis
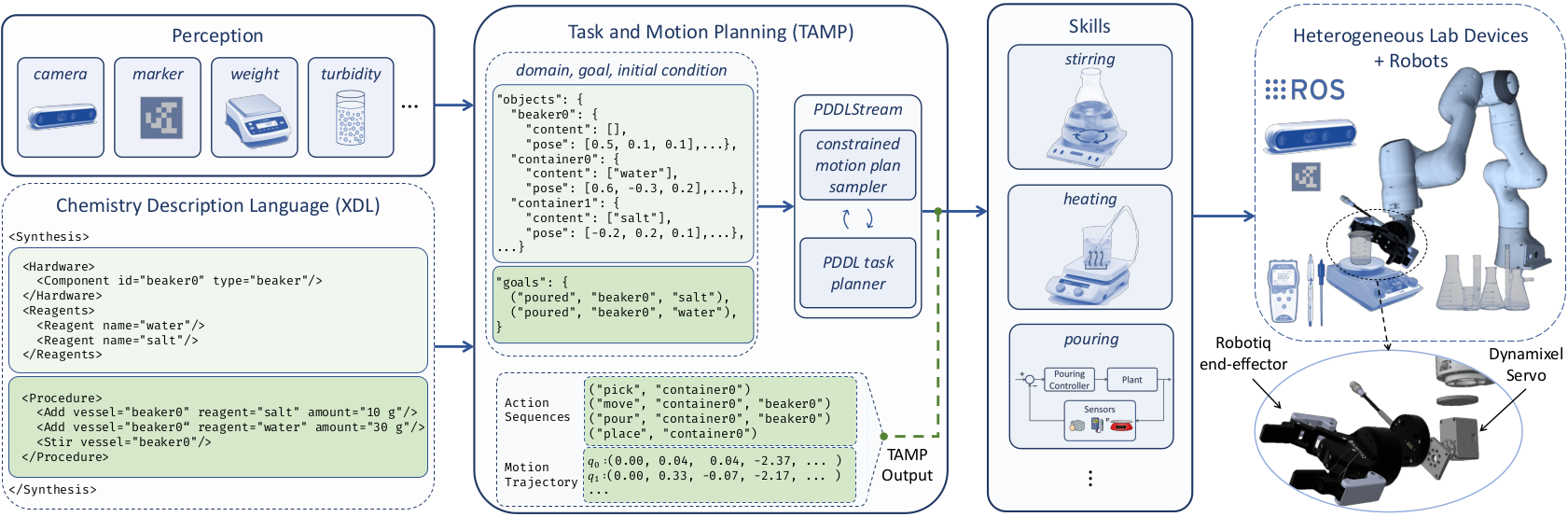
We've developed a new framework for robot-assisted chemical synthesis that includes Perception, Task & Motion Planning, and Skills blocks. This framework allows robots to utilize available lab devices (such as sensors and actuators) by adding them to the robot network via ROS. The robot is also equipped with an extra degree of freedom at its end-effector, enabling it to perform constrained motions. Our framework receives the chemical synthesis goal in XDL format, and converts the procedure component into corresponding PDDL goals. The hardware and reagents components then identify the necessary initial conditions for synthesis. Perception is used to detect objects, estimate their positions and contents in the workspace, and monitor task progress. Finally, PDDLStream generates a sequence of actions for the robot to execute.